So, I have been doing more reading, and I found a concept that I think I glossed over up to this point. Input Completeness is the condition that the output should not change until all inputs are available. This must hold for both NULL->DATA and DATA->NULL wavefronts. I don’t actually understand why this is necessary yet.
I had vaguely considered the concept as weather or not internal lines would ever toggle more than once during a single data cycle, but I thought that since all data was expressed by asserted lines, a system couldn’t toggle as long as there were no inverters. Even if there was feedback, none of the gates use compliments of inputs, so adding more inputs either sets the gate, or leaves it alone. There is no way to clear a set line, without clearing an input. I will look into the reasons this condition is necessary at some point.
Quick thing: I will be using the term CSOP a bunch. It means Canonical Sum-of-Product. This is the version of the equation that has all of the truth table rows brought out separately. Even if the function can be optimized to eliminate a variable from a term or two, that would violate the rules of CSOP.
The NULL->DATA Wavefront
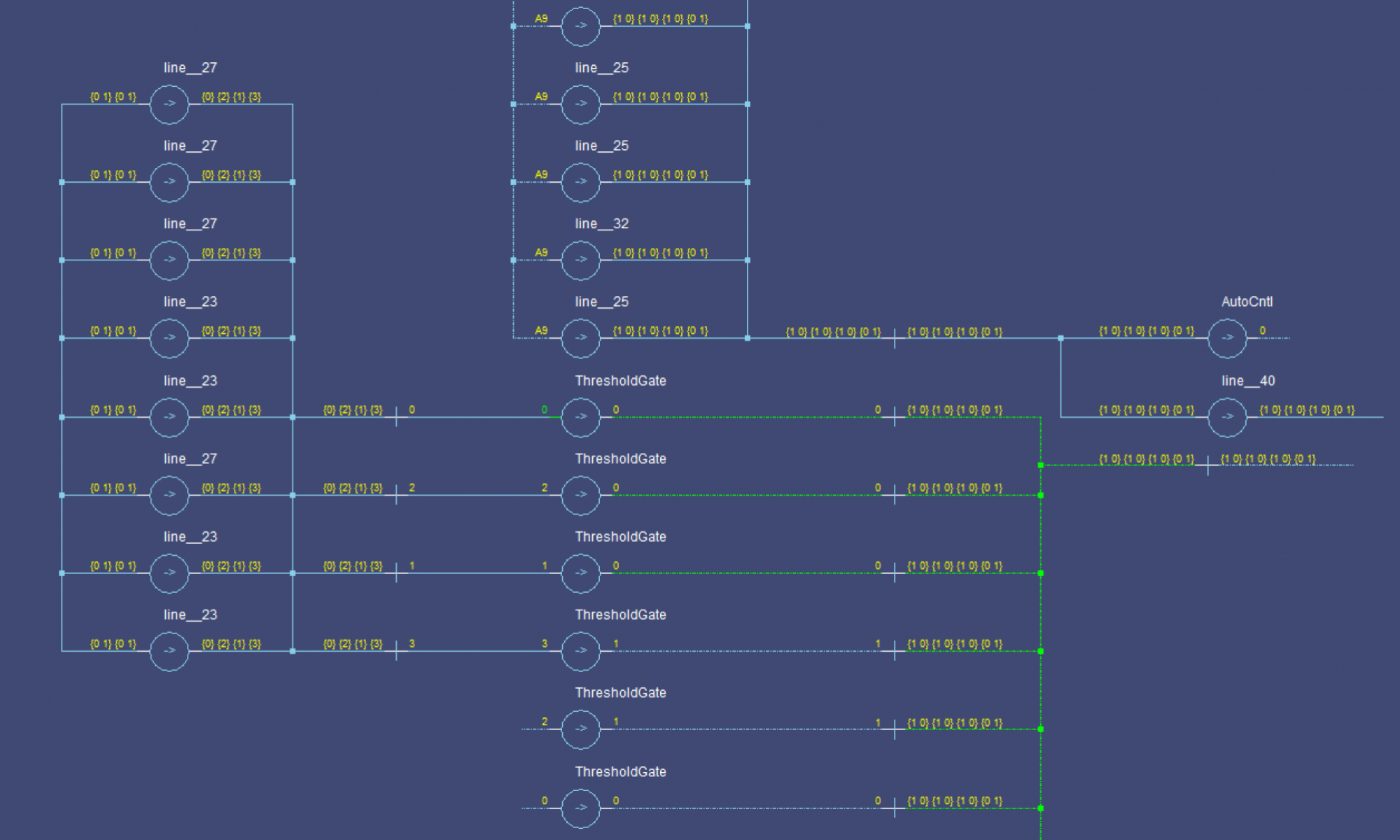
If the circuit is initially NULL (inputs, outputs, internals) then the outputs cannot change until all inputs are DATA. The simplest way to do this is to use the CSOP implementation. With CSOP, every input is used in one of the AND-Plane gates (either as DATA0 or DATA1). As such, none of the AND-Plane gates can trigger until all of the inputs have values.
The AND-Plane is the column of THNN gates that all the inputs tie into (all possible combinations of input DATA values).
The DATA->NULL Wavefront
The DATA->NULL transition for any individual gate is held until all its inputs go to NULL. As such, once an output is set, it won’t clear until its inputs clear. Unfortunately that only applies to the inputs involved in setting the output; in CSOP, again, this is all of them. If the output is not constructed with CSOP, then in some cases, some inputs won’t affect the outputs (think the unselected inputs of a MUX).
Solutions
It is not necessary to implement the function with CSOP, you can take the logic function and add (A.0+A.1) to the product terms that are missing A, for example. The function can then be simplified/expanded from there. This is described some here on page 17 (section 3.1):
I haven’t found a openly available source for this, if you are a student, check your university’s library website. If you do find a source, comment it.