I am transitioning back into school, and might not post for a bit.
Sorry.
An assortment of technical content
I am transitioning back into school, and might not post for a bit.
Sorry.
A Shifter takes an array of bits, and shifts them right of left. Numerically, this is like multiplying or dividing by 2 (in the case of binary numbers). Some examples:
| Direction | Input | Shift Amount | Output |
|---|---|---|---|
| Right | 001001 |
1 | 000100 |
| Left | 001001 |
1 | 010010 |
| Right | 001001 |
2 | 000010 |
| Left | 001001 |
3 | 001000 |
This could be applied to non-binary variables as well (like 3-rail signals) but the exact meaning will be different. There are a few ‘extensions’ to this behavior I’d like to add:
Rotation allows the bits shifted out one end to be shifted back in the other:
| Direction | Input | Output |
|---|---|---|
| Right | 1001 |
1100 |
| Left | 1001 |
0011 |
Arithmetic shifting treats the shift as a mathematical operation and preserves the sign of the number. It is only valid for right shifts.
| Direction | Input | Output |
|---|---|---|
| Right | 100(-4) |
110(-2) |
| Right | 110(-2) |
111(-1) |
The sign of a number is represented by leading 1’s in the MSB, so an arithmetic right shift adds 1’s into the leftmost bits, if the number was negative. This is accomplished by shifting in the MSB.
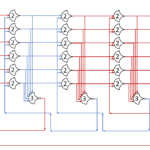
Each shift_amount bit corresponds to a shift of 2^n, where n is the index of the bit. Each constant-size shift can be accomplished with only wiring. As my CprE 381 professor always said, if you have two possible values, the easiest way to pick one is a MUX. So, each shift_amount bit will choose between an unshifted, or 2^n shifted value. By connecting these in layers, we get a shift of any size.
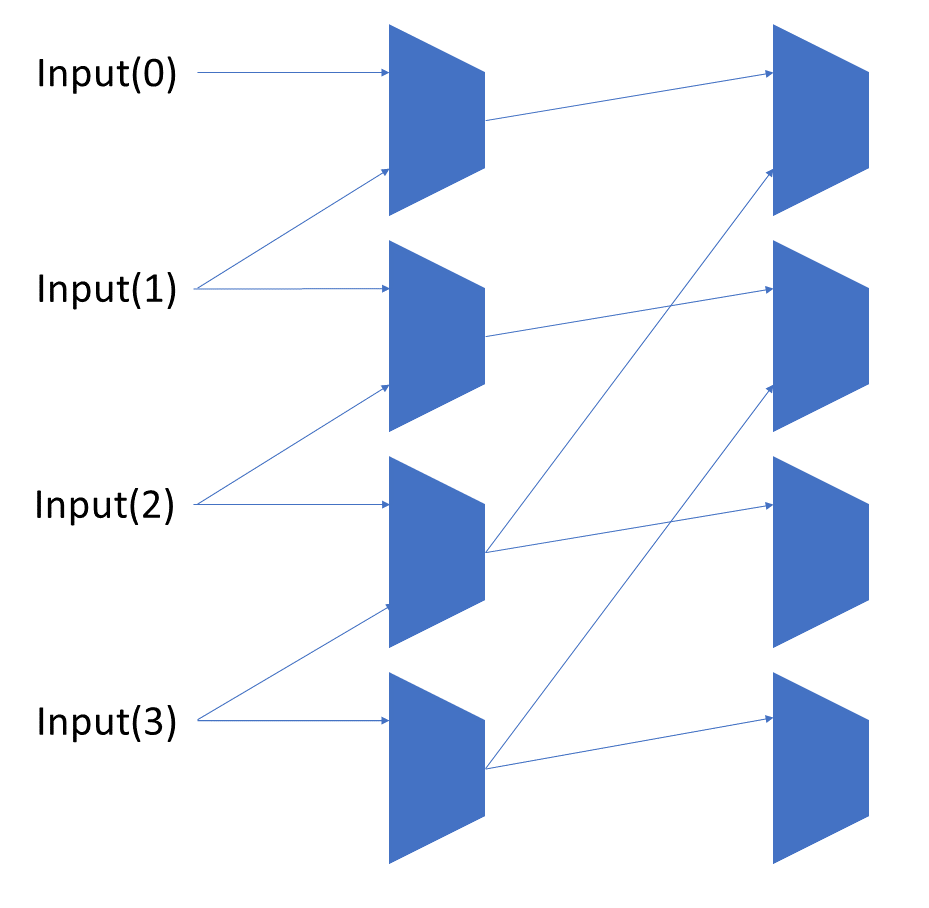
The un-supplied inputs are 0’s. The first column is controlled by shift_amount(0), the second column is controlled by shift_amount(1).
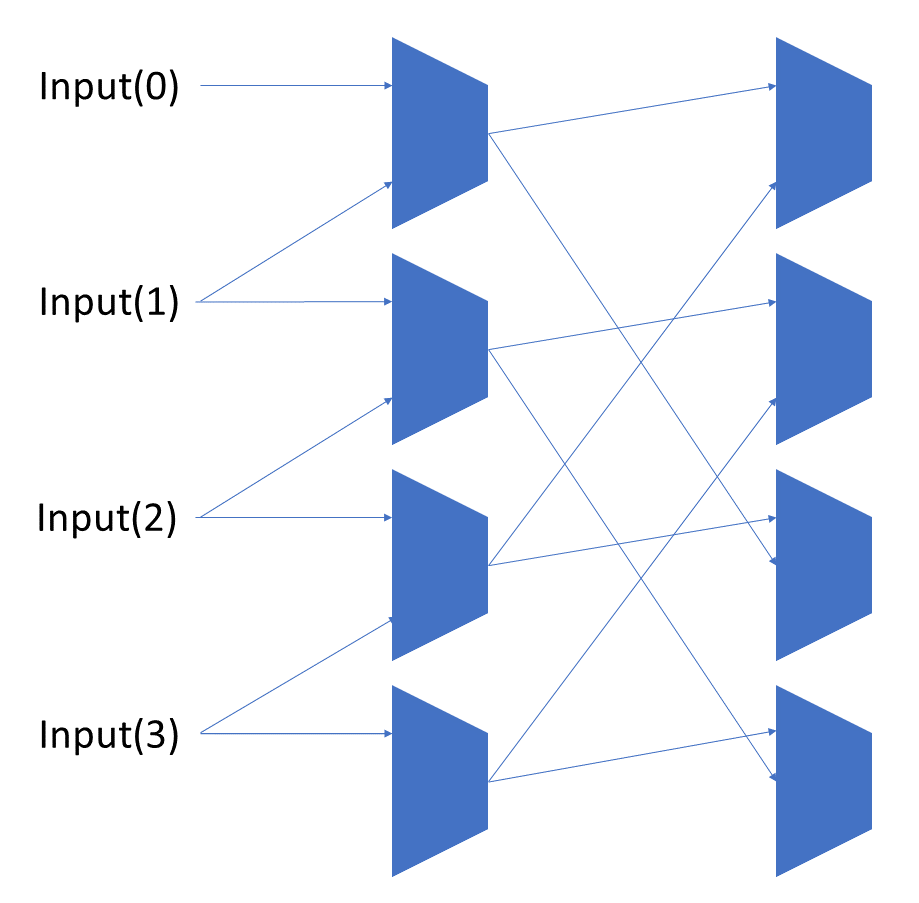
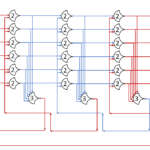
To change the direction, we add a mux at the beginning that selects a reversed version of the input, let the shifter shift that, then un-reverse it at the end.
To add rotations, we add another input to the MUX’s at the bottom that feeds back from the top, so that the ‘lost’ bits are shifted back in.
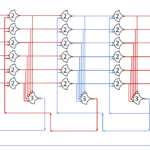
To add arithmetic operations, the unassigned inputs in the lower MUX’s are changed from 0 to the MSB of the input. This signal is constant across all the MUX’s it is applied to, so it is generated with a single MUX. On a left shift, the shifted-in value must be 0, so the MUX can only output the MSB when a right arithmetic shift is selected.
the VHDL source, using generics to make it work for any number of inputs (even non-powers of 2, btw):
library ieee;
use work.ncl.all;
use ieee.std_logic_1164.all;
entity Shifter is
generic(NumInputs : integer := 2);
port(inputs : in ncl_pair_vector(0 to NumInputs - 1);
shift_amount : in ncl_pair_vector(0 to clog2(NumInputs) - 1);
direction : in ncl_pair;
rotate : in ncl_pair;
logical : in ncl_pair;
output : out ncl_pair_vector(0 to NumInputs - 1));
end Shifter;
architecture structural of Shifter is
constant NumShiftAmountBits : integer := clog2(NumInputs);
constant NumRows : integer := clog2(NumInputs);
type RowSignals is array (integer range <>) of ncl_pair_vector(0 to NumInputs - 1);
-- The shifted array at each stage of the shifter.
signal rows : RowSignals(0 to NumRows);
-- A generated value that is always DATA0 or NULL as appropriate
signal zero_in : ncl_pair;
-- The third input that is used for either logical or arithmetic operations.
signal non_rotate_in : ncl_pair;
signal input_reversed : ncl_pair_vector(0 to NumInputs - 1);
signal output_reversed : ncl_pair_vector(0 to NumInputs - 1);
begin
produceDATA0: THmn
generic map(M => 1, N => 2)
port map(inputs(0) => inputs(0).DATA0,
inputs(1) => inputs(0).DATA1,
output => zero_in.DATA0);
zero_in.DATA1 <= '0'; msb_in_mux: MUX generic map(NumInputs => 4)
port map(iOptions(0) => inputs(NumInputs-1),
iOptions(1) => zero_in,
iOptions(2) => zero_in,
iOptions(3) => zero_in,
iSel(0) => logical,
iSel(1) => direction,
output => non_rotate_in);
in_bit_flipper: for i in 0 to NumInputs-1 generate
input_reversed(i) <= inputs(NumInputs-1-i); directionMux: MUX generic map(NumInputs => 2)
port map(iOptions(0) => inputs(i),
iOptions(1) => input_reversed(i),
iSel(0) => direction,
output => rows(0)(i));
end generate;
-- rows(0) <= inputs;
rowsloop: for r in 0 to NumRows-1 generate
columns: for c in 0 to NumInputs-1 generate
ifstd: if (c + (2**r)) < NumInputs generate multiplexer: MUX generic map(NumInputs => 2)
port map(iOptions(0) => rows(r)(c),
iOptions(1) => rows(r)(c + (2**r)),
iSel(0) => shift_amount(r),
output => rows(r+1)(c));
end generate;
ifwrp: if (c + (2**r)) >= NumInputs generate
multiplexer: MUX
generic map(NumInputs => 4)
port map(iOptions(0) => rows(r)(c),
iOptions(1) => non_rotate_in,
iOptions(2) => rows(r)(c),
iOptions(3) => rows(r)((c+(2**r)) mod NumInputs),
iSel(0) => shift_amount(r),
iSel(1) => rotate,
output => rows(r+1)(c));
end generate;
end generate;
end generate;
out_bit_flipper: for i in 0 to NumInputs-1 generate
output_reversed(i) <= rows(NumRows)(NumInputs - 1 - i); outMux: MUX generic map(NumInputs => 2)
port map(iOptions(0) => rows(NumRows)(i),
iOptions(1) => output_reversed(i),
iSel(0) => direction,
output => output(i));
end generate;
end structural;
This code generates the necessary multiplexers for shifting the signal, flipping it at the input and output, and selecting how to handle the bits that can’t be shifted normally (because the source is out of range).
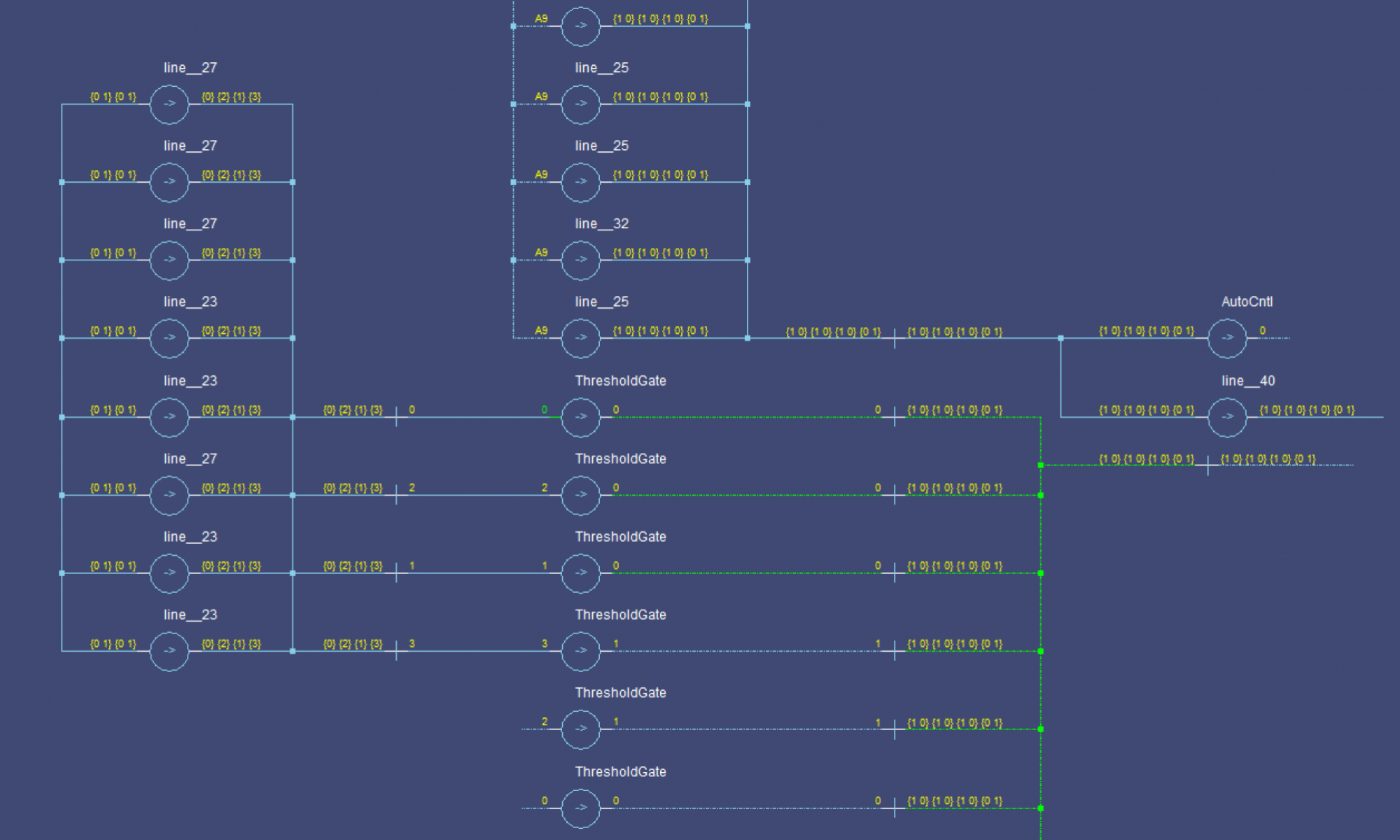
I made a simple test script to run through some cases. Everything seems to check out, here’s a sample:

My naming conventions have probably been misleading. I have mostly treated NCL bits as three-state logic (NULL, DATA0, and DATA1) this is a valid way to work with the data, but it is limiting. The better way to think of it is as individual 2-state logic lines (NULL and DATA).
Internally to a component, using single-rail signals is very helpful. Not only are single-rail signals the inputs to all NCL gates, but they can be used as links between components as well. Single-rail signals cannot really be passed through registers because they have to be asserted for the DATA wave to read as complete. This would prevent the signal from conveying meaning, as it would always have the same value during computations.
This section is unverified theory. Please share your thoughts below.
I will b using _ to refer to a non-asserted rail (null) and ^ to refer to an asserted rail (data).
Another benefit of this view is that you get more flexibility in state encodings. Standard encodings (that I’ve come across) use mutually exclusive data lines. So a 3-rail signal would have 3 possible states and a 4-rail signal would have 4 states. By thinking of the data more in terms of DATA and NULL, you get to design your own state encodings. For example, with a 4-rail encoding, you could use the following 6 states: {__^^, _^_^, _^^_, ^__^, ^_^_, ^^__}.
A state space is the set of valid states. We will use it here a little more specifically to refer to the valid DATA states. Not all state spaces will actually work for NCL, The completion logic has to be able to correctly identify completed states. For example, if we try to use the following for a 3-rail signal, we have a problem: {__^, _^^, ^^^}. If the result is the last state (^^^) and the data on line 0 arrives first, the completion logic will see it as a complete __^ and pass on the wrong result.
For any state, it has to be able to partially arrive, without looking like another state. This is required for delay insensitivity. A simple way to make this happen is to use M-hot states. By that I mean that each state will have the same number of rails asserted as data (^), and all such states can be used. The number of states in such an assignment for a N-rail signal is M Choose N or C(M, N). This has its maximum value when M=N/2. It also has the benefit that any incomplete state has at most M-1 rails set, which will never match another state.
The logic proof-y version: ∀x,y∈S:(x&y!=x) and (x&y!=y) must hold (& is the bitwise AND operator) where S is the state space.
Using this N/2-hot encoding, the states/rail is
| Rails | States | State Increase Factor |
|---|---|---|
| 1 | 1 | |
| 2 | 2 | 2 |
| 3 | 3 | 1.5 |
| 4 | 6 | 2 |
| 5 | 10 | 1.6667 |
| 6 | 20 | 2 |
Using this encoding, you get nearly twice as many states for each rail you add. Using mutually-exclusive rails (1-hot) you get 1 extra state per rail. Even if you break it up into 2-rail pairs and use combinations of those values, you only double your state space for every 2 rails you add. In the table above, s you increase the number of rails, the factor approaches 2 for the odd numbers of rails as well.
In special cases, you might want a more complex encoding, some examples of valid state spaces:
{___^, ^_^_, _^__}{__^^, ^___, _^__}{^^^_, ^^_^, ^_^^, _^^^}{^^^_, ___^}{__^^, _^_^, _^^_, ^__^, ^_^_, ^^__}While you can increase the compatibility of your modules by using a standard state space, sometimes you can reduce the number of rails by using more dense encodings. Additionally, signals that exist only between registers (are not passed on) can actually be 1-rail signals, which is something I have a hard time remembering when integrating components. These 1-rail signals can act as enable signals: They can be used to prevent data from propagating, or to allow it to propagate (remember steering).
In Null Convention Logic, all computation is done with oscillating DATA/NULL cycles. The NULL cycles clear the whole circuit, the DATA cycles perform the computation. This requires 2 transition sets per computation (Previous DATA => NULL => Next DATA). Sometimes the DATA output from a component will not be used (think the unselected inputs of a MUX).
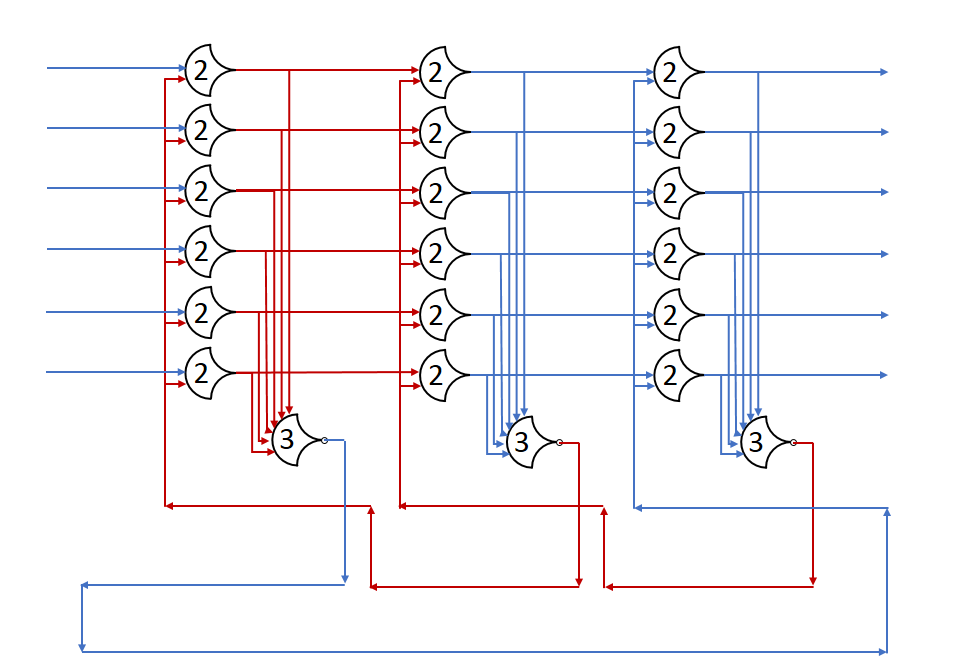
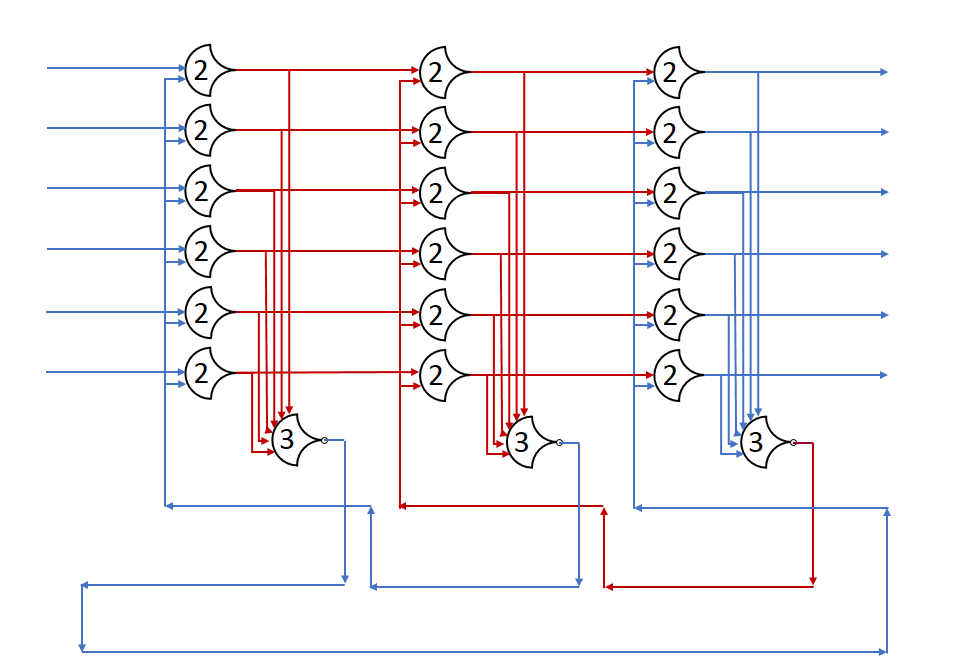
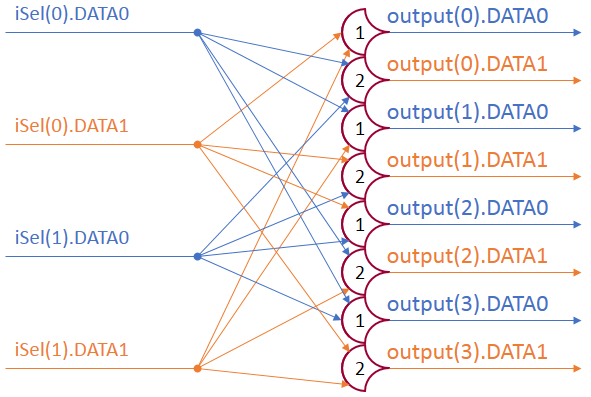
When using steering, the DATA wavefront is only passed to the necessary components. In the case of a MUX, the outputs of these components are then combined as needed with TH1n gates:
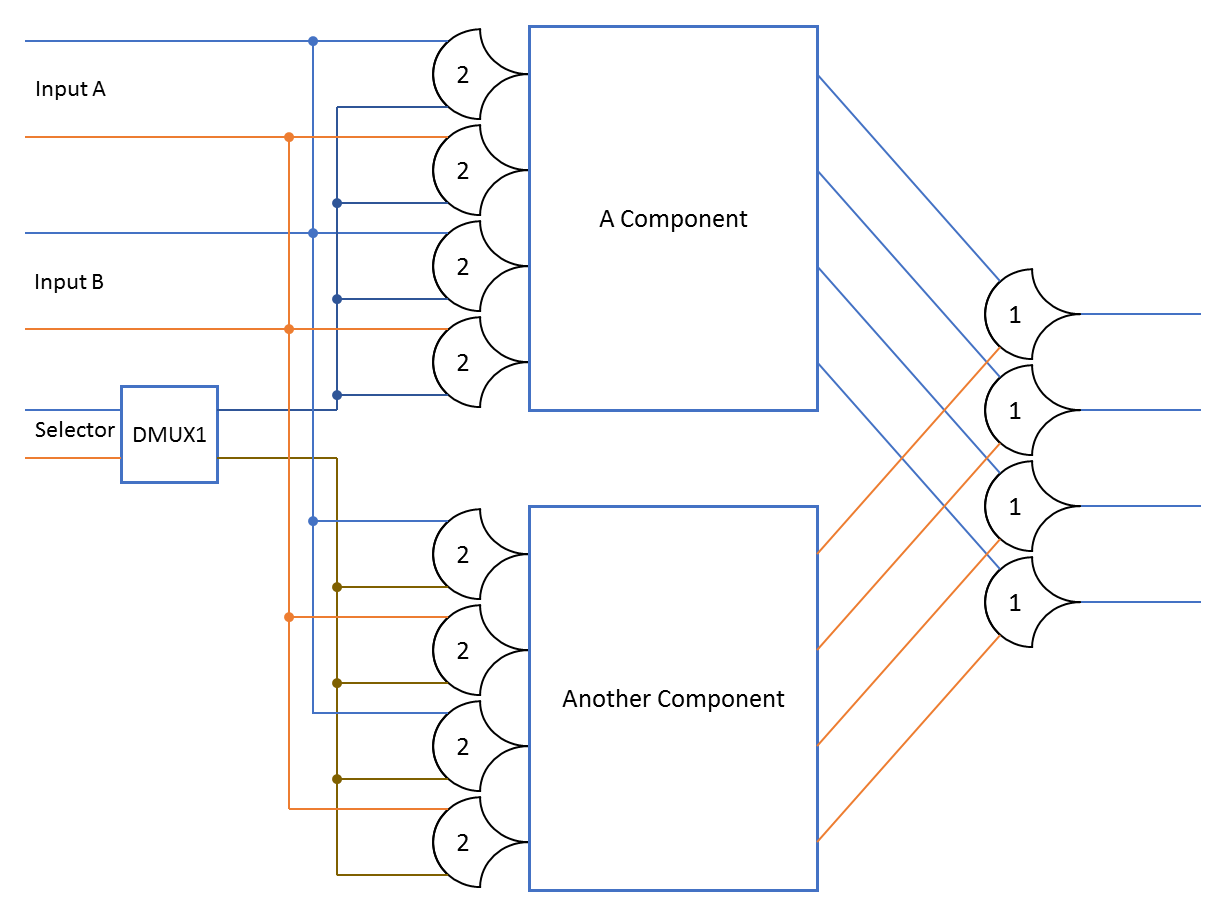
The TH22 gates in this example do not allow the DATA wavefront to apss into the components unless they are selected by the DMUX1. During any particular DATA wavefront, only one of these components will be active at a time; the other component will remain NULL. This saves transitions, and thus power. This method also works if only some, or no inputs are shared.
The DMUX1 component is a decoder, that only outputs the DATA1 lines. Technically, I think it matches the NCL network criteria, if you consider the outputs to be single rail outputs, which have only one DATA value. The DMUX1 is used to enable only the selected component.
We will use steering when our ALU has more than just the Adder with glue logic. At some point we’ll have a multiplier, and a shifter, only one of these will operate at a time.
For more on steering, see Karl Fant’s site. His blog posts have lots of good theory too.
An arithmetic logic unit (ALU) is a component that performs operations on (usually) two or more sets of inputs, and outputs results. The operation performed is designated by an Operation signal.
Our ALU will start simple, and we’ll add more operations over time. First, let’s build an add/sub unit. I already have an adder, which can be used to subtract by swapping some signals: In single-rail (standard) logic, to subtract instead of add, the second input to the adder is inverted and the carry bit is set – in NCL, we invert the input by swapping DATA0 and DATA1.
The swapper operates as the following equations
output.0 = input.0*swap.0 + input.1*swap.1 output.1 = input.1*swap.0 + input.0*swap.1
These can be implemented with THxor0 gates:
output.0 = THxor0(input.0, swap.0, input.1, swap.1) output.1 = THxor0(input.1, swap.0, input.0, swap.1)
Our add/sub module will have these on every bit on input to the adder, with iC having the swap signal fed directly into it. Swap will be exposed in the component’s port as the add/subtract selector:
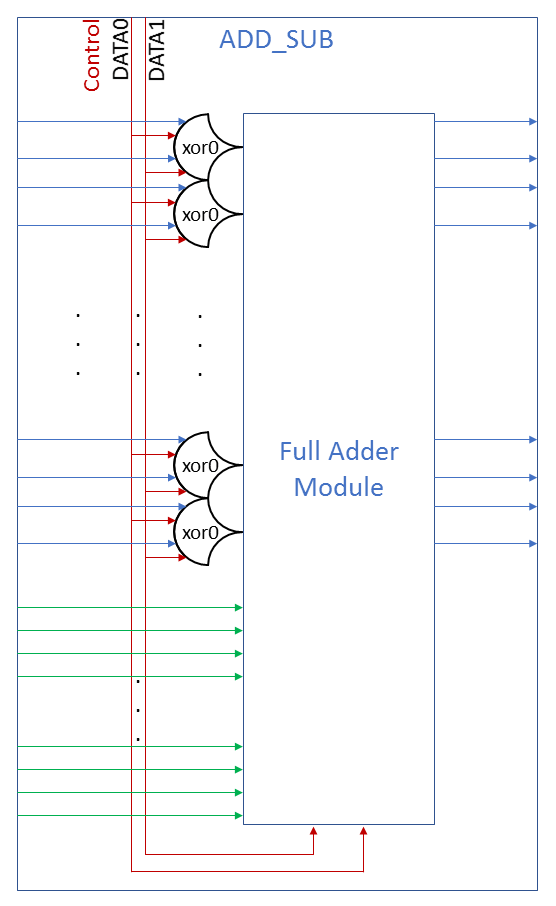
Green is iA, blue is iB, and red is iC on the Adder. If Control is asserted (DATA1) iB will be inverted and the carry in will be asserted as well, resulting in subtraction.
This module actually fulfills the interface of an ALU by itself, it has data inputs, and a opcode. When we add more operations, we’ll wrap it all up in a ALU block and add a MUX.
To implement this in VHDL, we need 1 Adder module and 2*N THxor0 gates:
use ieee.std_logic_1164.all;
use ieee.numeric_std.all;
use work.ncl.all;
entity AddSub is
generic(NumBits : integer := 4);
port(iA : in ncl_pair_vector(0 to NumBits-1);
iB : in ncl_pair_vector(0 to NumBits-1);
Operation : in ncl_pair;
oS : out ncl_pair_vector(0 to NumBits-1);
oC : out ncl_pair);
end AddSub;
architecture structural of AddSub is
-- iB into adder, potentially inverted from entity input
signal adder_iB : ncl_pair_vector(0 to NumBits-1);
begin
plainAdder: Adder
generic map(NumAdderBits => NumBits)
port map(iC => Operation,
iA => iA,
iB => adder_iB,
oS => oS,
oC => oC);
bits: for iBit in 0 to NumBits-1 generate
inverter0: THxor0 -- DATA0, Potentially inverted
port map(A => iB(iBit).DATA0,
B => Operation.DATA0,
C => iB(iBit).DATA1,
D => Operation.DATA1,
output => adder_iB(iBit).DATA0);
inverter1: THxor0 -- DATA1, Potentially inverted
port map(A => iB(iBit).DATA0,
B => Operation.DATA1,
C => iB(iBit).DATA1,
D => Operation.DATA0,
output => adder_iB(iBit).DATA1);
end generate;
end structural;
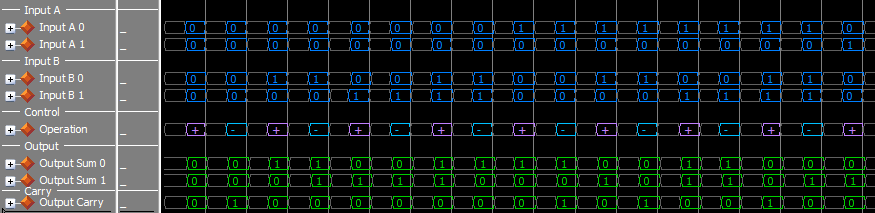
The 2-bit case above is a little small, but it runs quickly. I have tested the module up to 6 bits. To change the number of bits, change the number at the top of the test script. The first several cases (interpreted to decimal):
0+0=00-0=00+1=10-1=-10+2=20-2=-2This test script does check the sum output, but it does not verify the carry out.
Commit: 55d8c9f
In this post, we built a ring of registers and set a data wavefront loose in it. We added many stages, and watched the single wavefront run through them. In this post, I’ll show what happens with multiple wavefronts.
First, we should establish how many registers we need for some number of wavefronts. From the Register Ring post, we know that in order for a state (DATA or NULL) to pass on, the next two stages must both be in the opposite state. This prevents the passage from overwriting the next stage’s state completely, as it has already passed on to the next stage.
Here, the DATA state (red) can move on to the next stage because the NULL state has been passed up to the 3rd stage. By overwriting the 2nd stage, no state is lost, because stage 2 has already finished with the NULL state.
Here, stage 2 cannot pass DATA on to stage 3 because that would remove the NULL state entirely. If there were 4 stages, and the 4th was NULL, then the 3rd stage could accept data, since the NULL state would be preserved.
As you can see, the number of stages in a state is not important, but rather the sequence must be preserved. Let’s assume a really long line of registers for a moment, with stage states: (DATA, NULL, NULL, DATA, ...) All of these NULLs can be assumed to be the same logical state, which we’ll refer to as NULL1, we’ll also call the first DATA state DATA1: (DATA1, NULL1, NULL1, DATA0, ...). Take the case where the last DATA wave can’t move because of some really slow stage after it. If we ‘run’ the system for a register delay, the DATA1 state progresses, and overwrites one of the NULL1 states, but there are still some left, so nothing is really lost. When DATA1 moves forward, a NULL state fills its stage; this is a new state, so let’s call it NULL2: (NULL2, DATA1, NULL1, DATA0, ...). If we run again, one might expect the DATA1 state to advance again, but taht would overwrite the NULL1 state completely, putting two distinct DATA states right next to each other. Having two adjacent DATA states prevents the components from resetting between them, which only produces correct results if the DATA states are identical. Since there is no guarantee that DATA1 and DATA0 are identical, we have to preserve the NULL between them.
There are states which would be deadlocked, however, as long as the initial conditions are valid (not deadlocked), the handshaking ensures that these states never occur as a propagation of the circuit.
Some examples:
(NULL, DATA, NULL, DATA) (4 states) – Nothing can pass, the system is deadlocked (we can’t actually get here naturally)(NULL, DATA, NULL, NULL) (2 states) – Only the DATA state can pass, the NULLs are contiguous, so they can be considered to be identical states(NULL, DATA, DATA, NULL) (2 states) – Both states can pass, the DATA can overwrite the NULL in position 4, and the NULL can overwrite the DATA in position 2(NULL, DATA, DATA, DATA) (2 states) – Only NULL can pass, if DATA was able to pass, the NULL could be deleted from the system(NULL, NULL, DATA, NULL) (2 states) – Only DATA can pass, if NULL was able to pass, the DATA could be deleted from the systemNote that DATA and NULL are symmetric and the values in the DATA wave don’t matter. You can swap instances of ‘NULL’ and ‘DATA’ and get a valid result.
In short, with an even number of stages, you can only have N/2 states. What about odd numbers?
(NULL, DATA, NULL, NULL, DATA) (4 states) – Only the first DATA can move, as it is the only stage followed by 2 of the opposite state(NULL, DATA, DATA, NULL, DATA) (4 states) – Only the first NULL can move, as it is the only stage followed by 2 of the opposite stateRemember that rotations still match
(NULL, DATA, NULL, NULL, NULL) (2 states) – Only the first DATA can move, as it is the only stage followed by 2 of the opposite state(NULL, DATA, DATA, NULL, NULL) (2 states) – Either state can move
(NULL, DATA, DATA, DATA, NULL) (2 states) – Either state can still move(NULL, NULL, DATA, NULL, NULL) (2 states) – Only DATA can moveIn the odd case, we can get up to (N+1)/2 states to fit. One thing to note is that when the pipeline is full (max number of states) only one state can move at a time in the odd case. In the even case, there’s that extra space that doesn’t get us another state, but it does give the states some wiggle room: more than one state can be advancing at a time.
From the above, we get: NumStages=NumStates+Advancement where Advancement is the maximum number of states that can advance at a time. Advancement must be greater than 0, if it equals 0, the pipeline will be locked. If Advancement>=NumStates then there’s no real advantage to adding more stages, unless the stages are not delay-matched.
Note: NumStates is always even in a ring.
We’ll start with a full pipeline (Advancement=1) and then try a throughput-optimized design (Advancement=NumStates) where every state can advance simultaneously. By using the same number of states, we can benchmark the throughput and latency of the two.
Lest use NumStates:=4, which corresponds to 2 NULL and 2 DATA states.
By our formula above, we need 4+1=5 stages. The initial state:
By putting the value of 0 in the first DATA state, and 1 in the second state, we can track when the ring completes a cycle. Throughput is 2/t_complete (two DATA states per trip around the ring) and latency is t_complete.
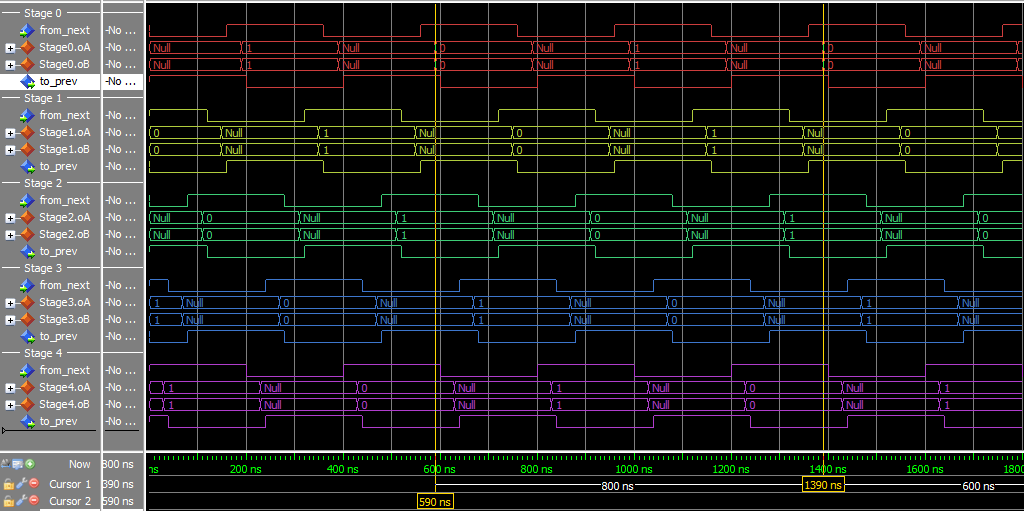
1/(400 ns) = 2.5 MHz800 nsThis experiment used the static_loop VHDL file, and a specific test script.
This version has 4+4=8 stages to go through, but all the states can move at the same time. Throughput should increase, but latency may increase as well. I’m not going to show the diagram because of size problems, but it’s a lot like the above, just with more stages.
Throughput and latency are calculated from the simulation, just as before. For optimal throughput and startup latency, arrange the states in pairs – 2 DATA, then 2 NULL, then 2 DATA, … – this increases the number of Advancement options at the start to the maximum: NumStates.
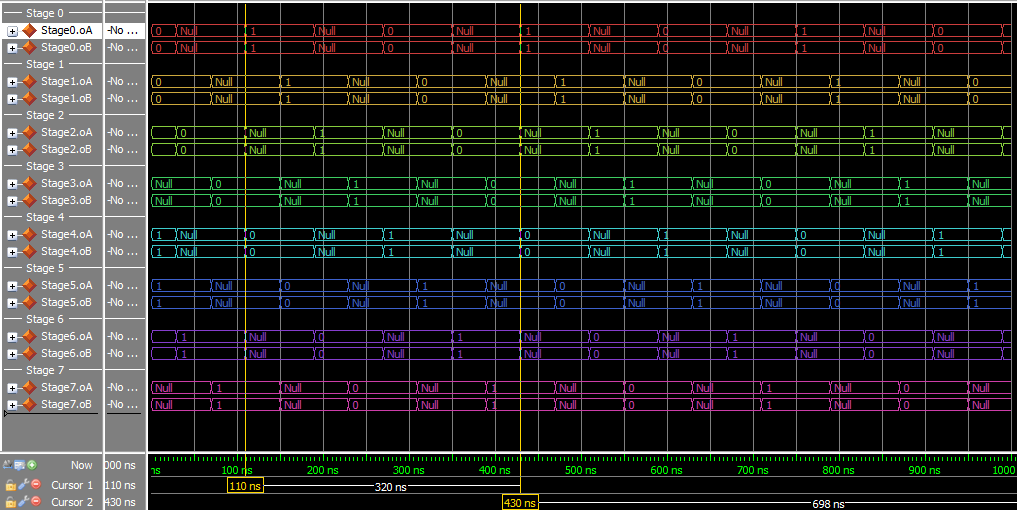
1/(160 ns) = 6.25 MHz320 nsThis experiment used the static_loop VHDL file, and a specific test script.
It looks like the throughput-optimized pipeline indeed has a higher throughput: By adding 3 states, we were able to more than double the efficiency of the ring, if you look at the simulation waveforms, in the first one only one stage is transitioning at a time. In the second, 4 stages are transitioning at a time. The second (faster) version uses 8/5 the resources though, so the decision on how many stages to use depends on available die space as well. In simulation, we don’t have to worry about this.
To run a test, please make sure you have the correct version of the repository. Most posts that involve VHDL source will mention a commit, with a link (if you find a post that should have one and it doesn’t, please let me know).
Open ModelSim
If you are a student, you can get the PE student version from Mentor here, or your university might have it in a computer lab
Open the project file (NCL Gates/NCL Gates.mpf) with ModelSim.
Type source scripts/tests/[testname].tcl where [testname] is the name of a test file in the scripts/tests/ folder.
My tests should compile the dependencies automatically, but I might have missed something at some point, so let me know if it doesn’t work.
Now that we’ve covered making data flow in circles, let’s use that to make a closed-system 4-bit counter. The module will have 4 state bits and 5 outputs (sum & carry out). To do this we’ll need an adder. I have a ripple carry NCL adder here.
We are going to put the adder between two registers, with a third register going back to hold the state during the NULL wavefront.
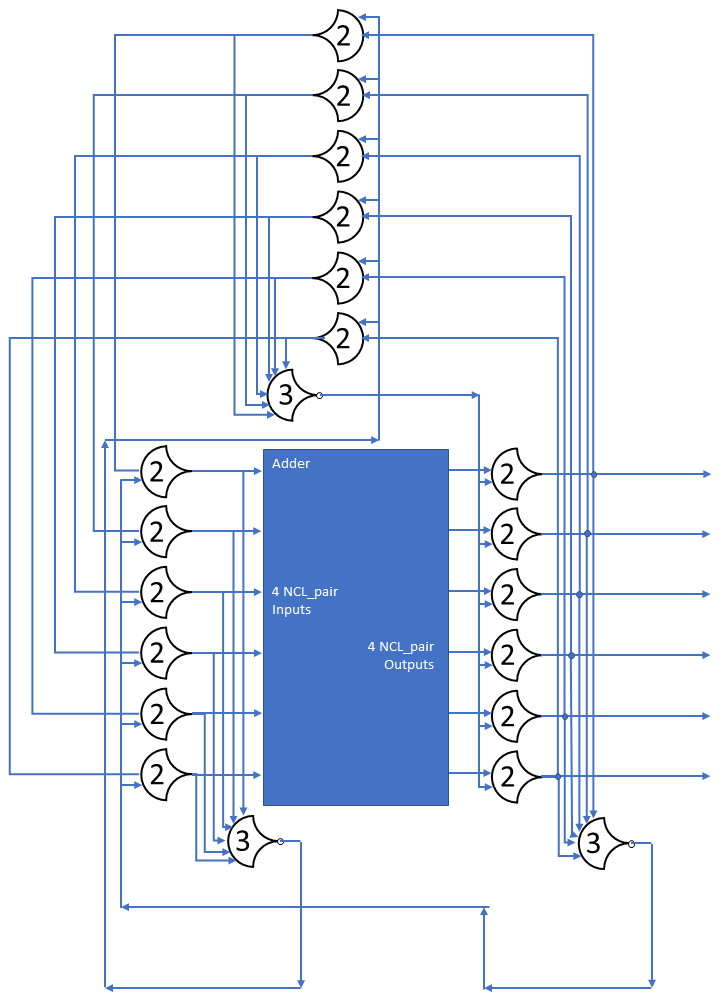
The circuit shown is for a 3-bit adder, just to save space. The concept is the same, just add a bit to each register. Additionally, the adder has a static “0001” input for the B operand, which clears to NULL when the A input goes to NULL, this could be synthesized as the lines that get asserted being gated with TH22 gates with the watcher gate output (non-inverted) being the second input.
The source for this can be found here, and the simulation script here. Below is a simulation of the circuit. The first rows are the output, the next 3 sets are the registers.
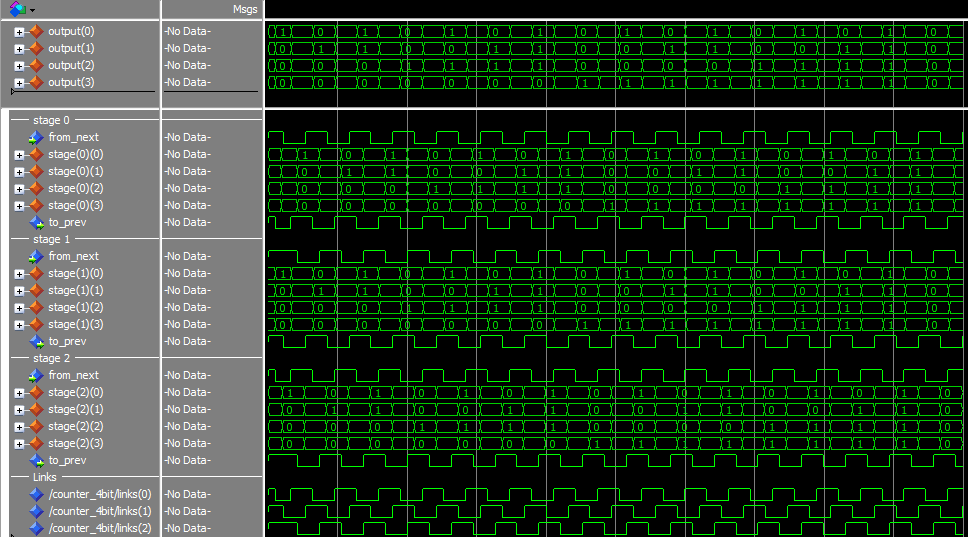
The output cycles from 0 to 15, then resets to 0. During the reset cycle, the Adder’s Carry Out bit is set.
This is a pretty simple sequential circuit, but it demonstrates how to properly feed back the data. The third register is needed because the ‘business logic’ has to be able to go to NULL, without the whole thing losing state.
Commit: 5854b0c
I want to start in on some sequential logic. We have a few combinational modules that we can build on already, so the est thing would be to make a sequential-only circuit. Once we’ve clarified how the concept works, we can add in combinational logic in.
By ‘sequential-only’, I am referring to a setup with only registers, it just passes it’s initial input in a loop forever, not changing it. I’m hoping it’ll help me with the concept a bit more, and flush out any issues with the registers.
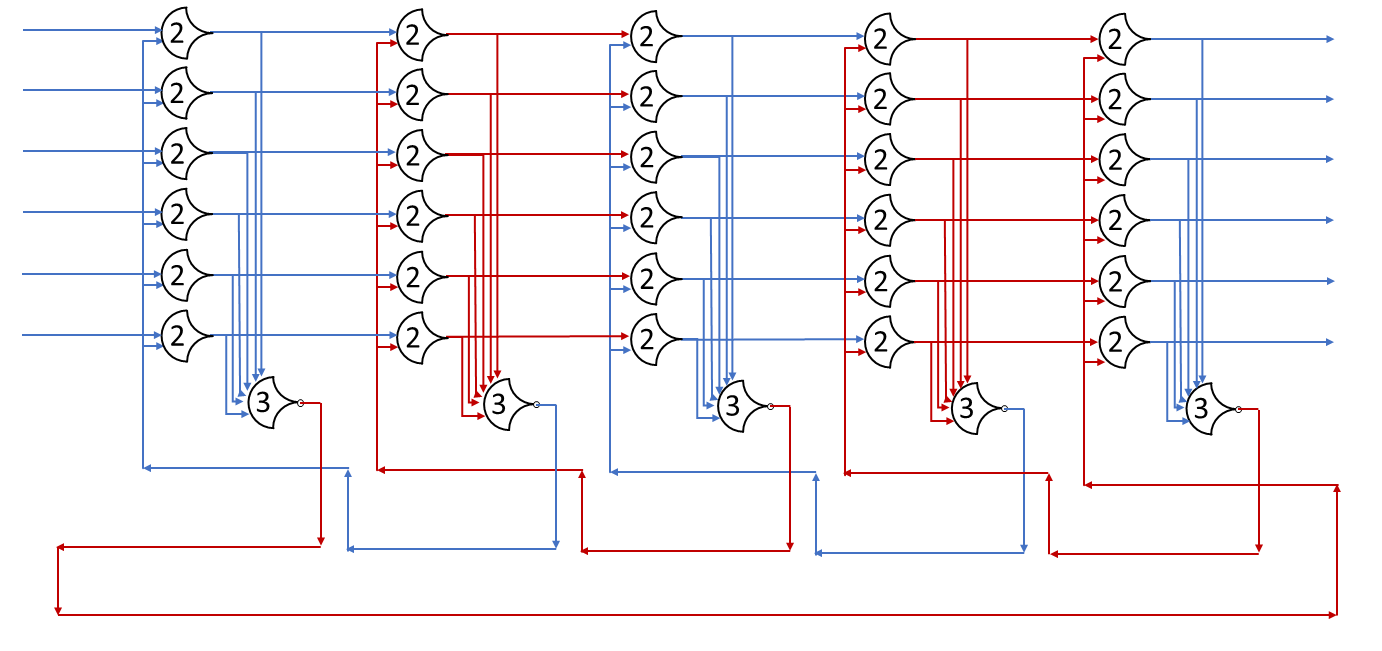
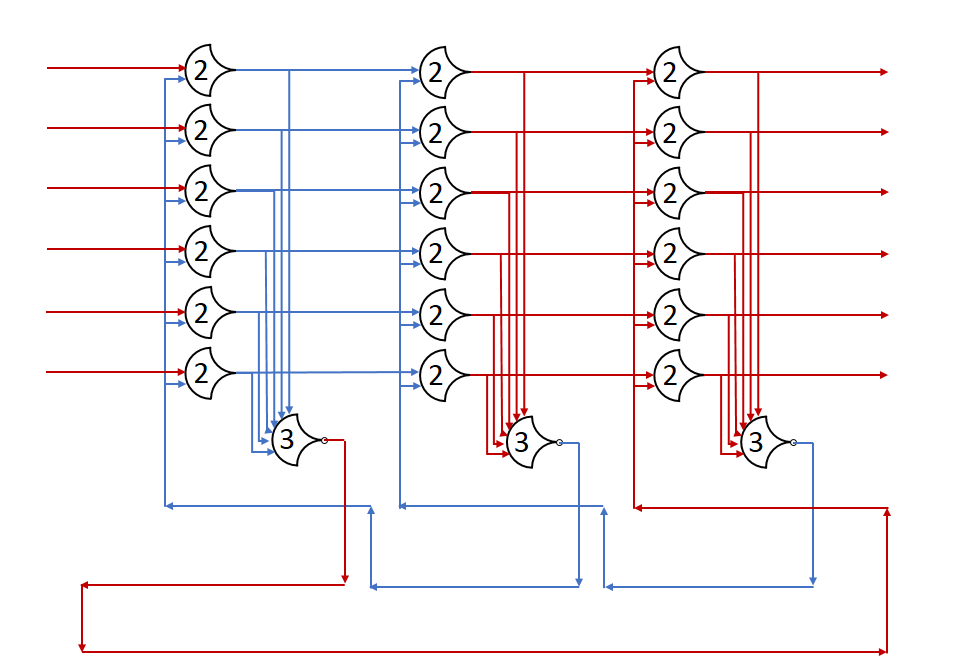
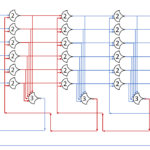
Here’s a diagram of a three stage loop, just imagine the outputs loop back (drawing it would be messy):
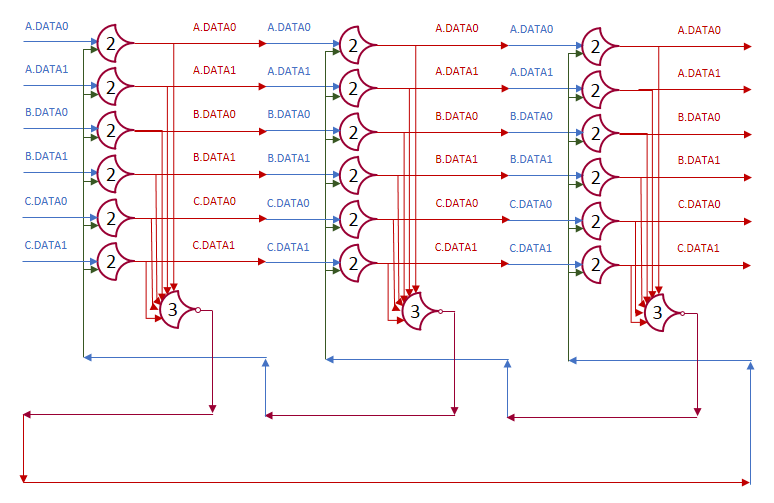
Let the initial state of the first stage’s outputs be DATA, with the first stage requesting NULL. The second and third stages are outputting NULL, and requesting DATA. Now let red be DATA, and blue be NULL.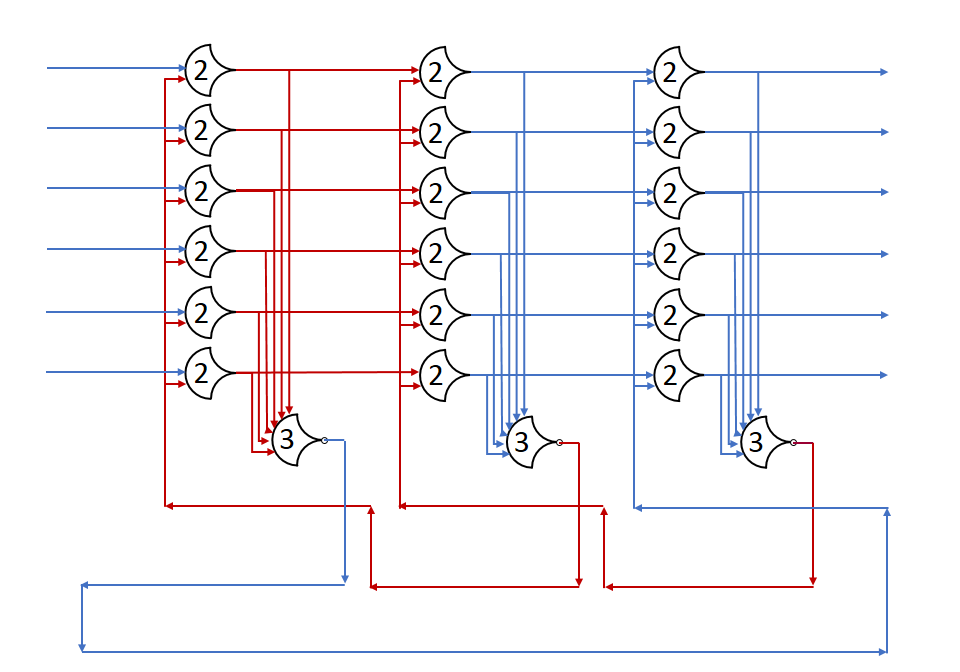
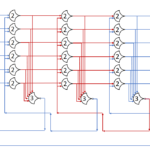
After the gate delay for the register, the DATA wave is passed, and a request for NULL is sent back.
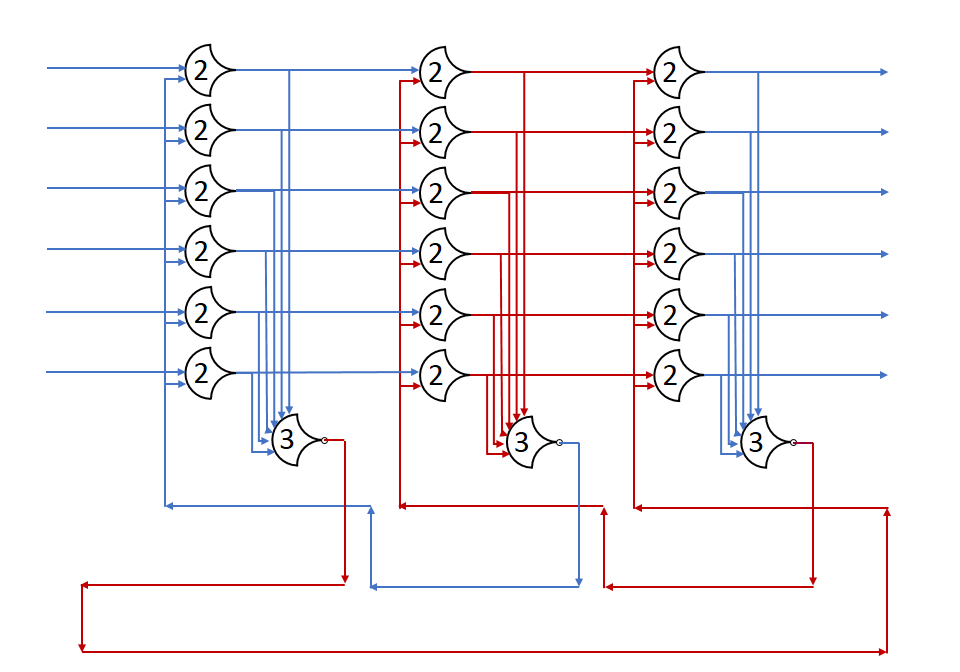
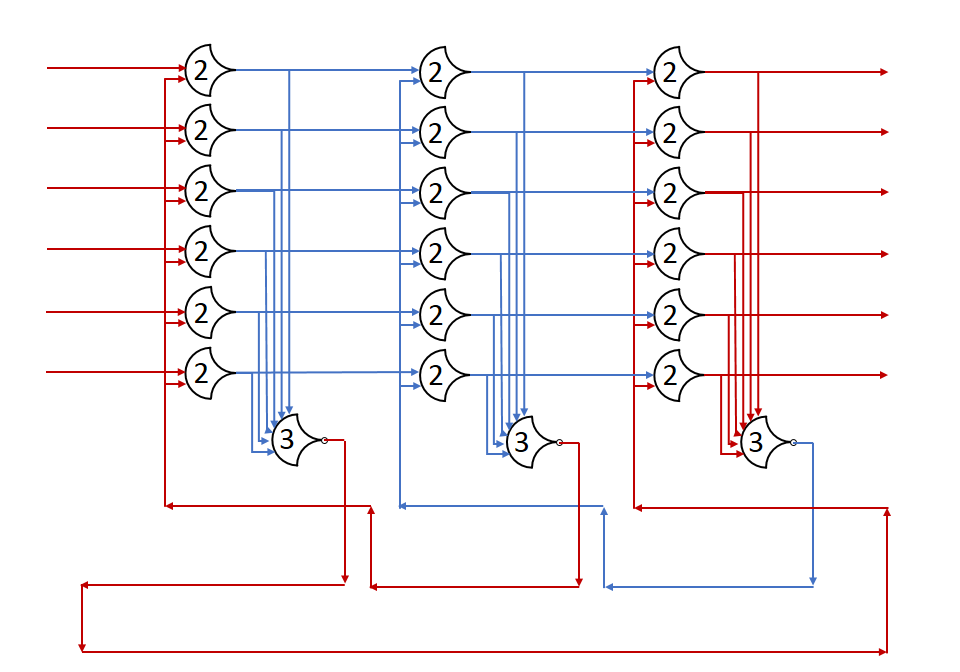
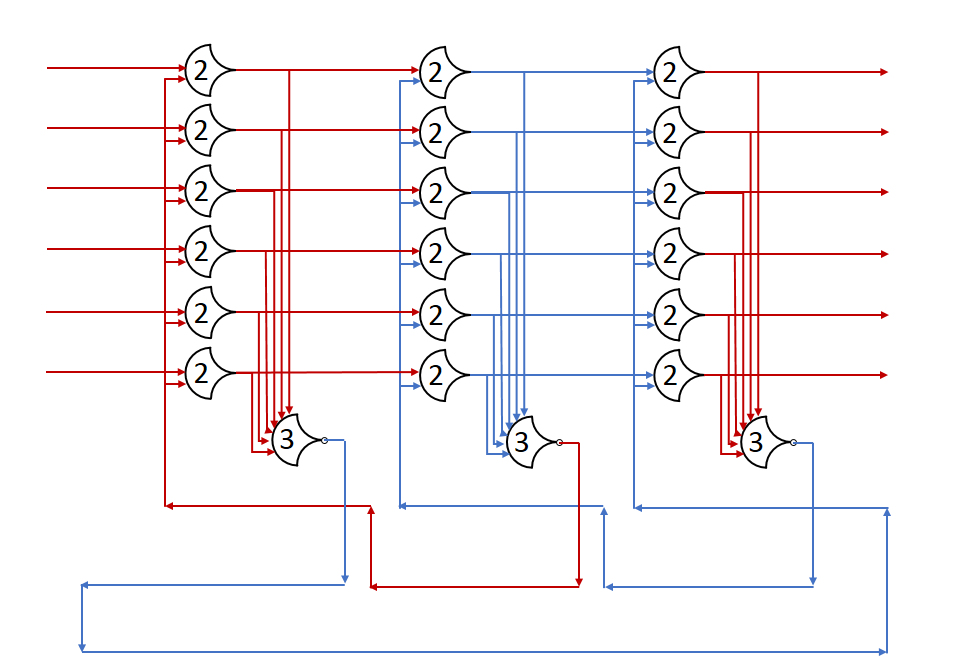
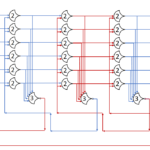
And, we’re back where we started
The ring will continue indefinitely. The VHDL source is available here, though without the test script, all stages remain at NULL, requesting DATA. I simulated this, and t turns out that it’s harder to see the pattern in graph form. To make things easier, I raised the number of stages.
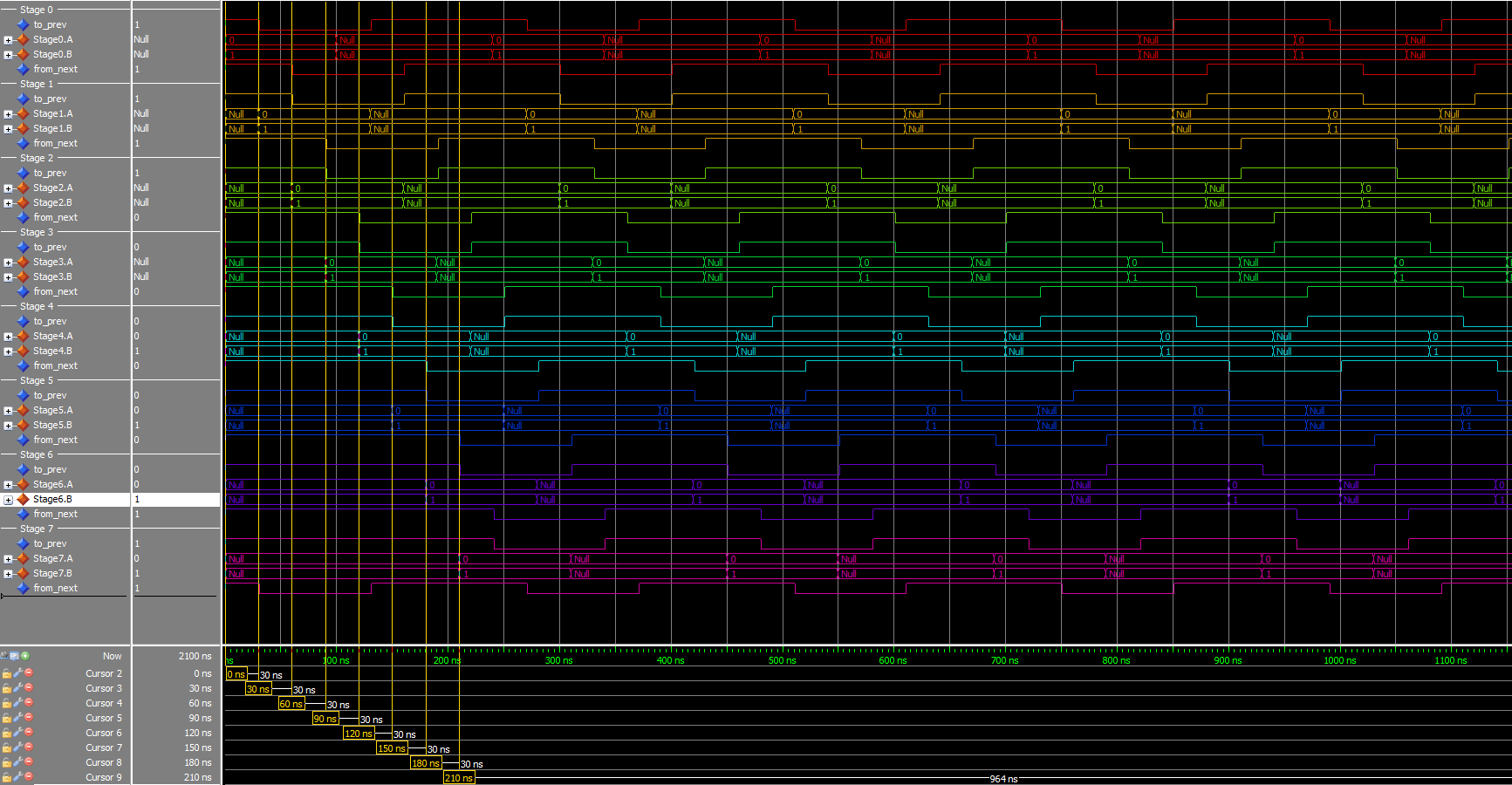
At 8 stages, I start to be able to see it clearly as distinct wavefronts going through the pipeline. To make it really obvious, ramp it up to 12.
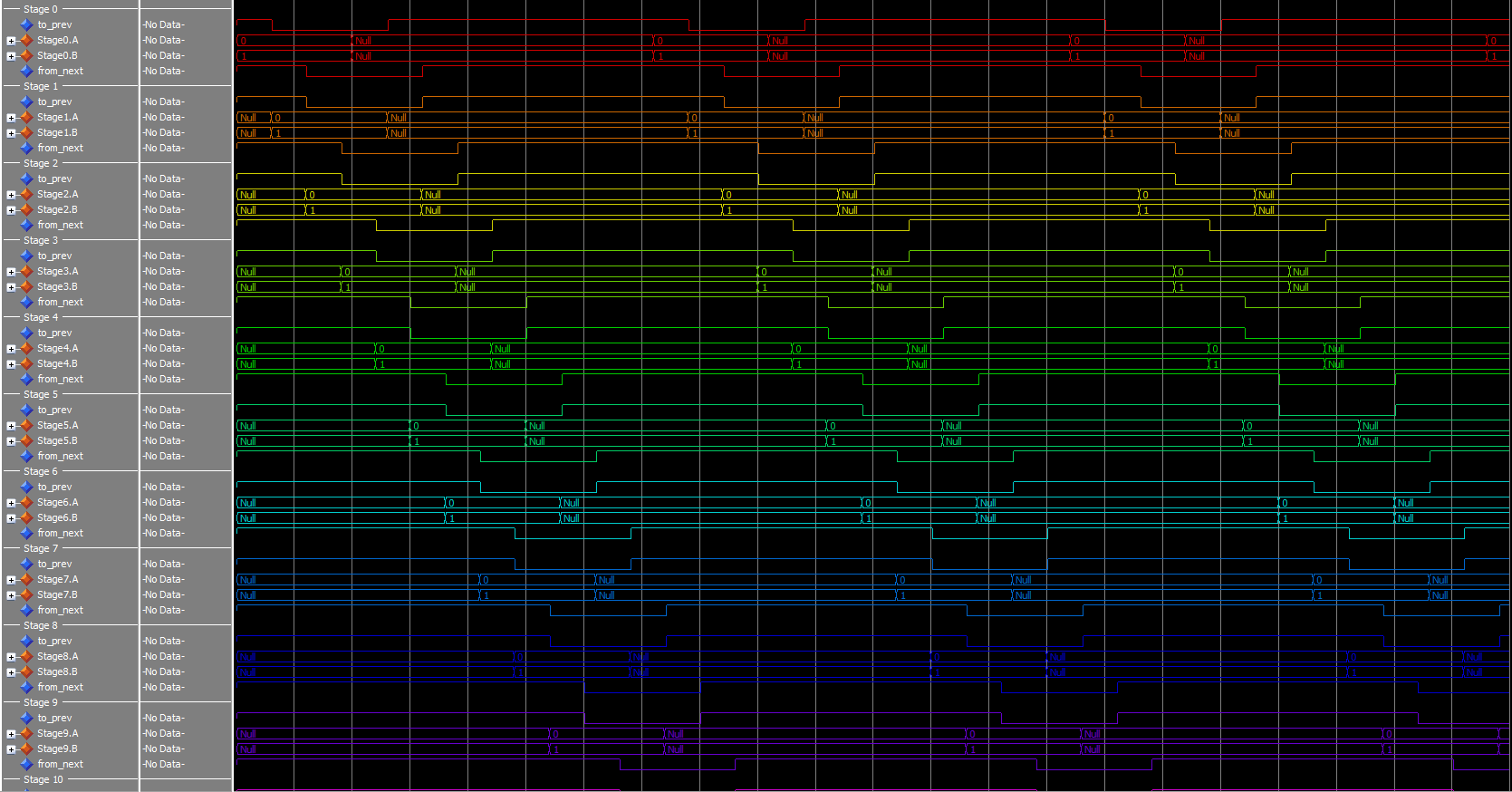
Not all stages shown.
And finally, if set at three, the pattern is harder to see, but it’s there. In the 3-stage case, the time spent requesting NULL and requesting DATA is the same for each stage.

If you use 2 stages, the system locks. A slideshow version of the ring pictures from above. As you can see, the transition to NULL only occurs while there are 2 DATA stages, and the transition to DATA only occurs while there are 2 NULL stages. This is so that no wavefront is ever ‘overwritten’. The second instance of that state saves the value.
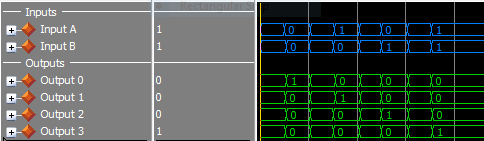
The circuit diagram of the decoder:
This decoder will be generic, and be implemented much like the MUX.
Each row will be generated based on it’s index. For each input:
The DATA0 output sets are combined with a THN1, and the DATA1 outputs are combined with a THNN:
Rows: for i in 0 to NumOutputs - 1 generate
cntlBits: for iBit in 0 to NumInputs - 1 generate
Cntl0Selection: if (to_signed(2**iBit, NumInputs+1) and to_signed(i, NumInputs+1)) = 0 generate
Gate0Inputs(i)(iBit) <= inputs(iBit).DATA1;
Gate1Inputs(i)(iBit) <= inputs(iBit).DATA0;
end generate;
Cntl1Selection: if (to_signed(2**iBit, NumInputs+1) and to_signed(i, NumInputs+1)) > 0 generate
Gate0Inputs(i)(iBit) <= inputs(iBit).DATA0;
Gate1Inputs(i)(iBit) <= inputs(iBit).DATA1;
end generate;
end generate;
Gate0: THmn
generic map(N => NumInputs, M => 1)
port map(inputs => Gate0Inputs(i),
output => outputs(i).DATA0);
Gate1: THmn
generic map(N => NumInputs, M => NumInputs)
port map(inputs => Gate1Inputs(i),
output => outputs(i).DATA1);
end generate;
This assigns input cases to the gates. If any non-selected values are asserted, then the DATA0 line of that case is asserted.
Adding the declarations around it:
library ieee;
use ieee.std_logic_1164.all;
use work.ncl.all;
use ieee.numeric_std.all;
entity Decoder is
generic(NumInputs : integer := 2);
port(inputs : in ncl_pair_vector(0 to NumInputs-1);
outputs : out ncl_pair_vector(0 to (2**NumInputs)-1));
end entity Decoder;
architecture structural of Decoder is
constant NumOutputs : integer := 2 ** NumInputs;
type GateInputs is array (integer range <>) of std_logic_vector(0 to NumInputs - 1);
signal Gate0Inputs : GateInputs(0 to NumOutputs-1);
signal Gate1Inputs : GateInputs(0 to NumOutputs-1);
begin
Rows: for i in 0 to NumOutputs - 1 generate
cntlBits: for iBit in 0 to NumInputs - 1 generate
Cntl0Selection: if (to_signed(2**iBit, NumInputs+1) and to_signed(i, NumInputs+1)) = 0 generate
Gate0Inputs(i)(iBit) <= inputs(iBit).DATA1;
Gate1Inputs(i)(iBit) <= inputs(iBit).DATA0;
end generate;
Cntl1Selection: if (to_signed(2**iBit, NumInputs+1) and to_signed(i, NumInputs+1)) > 0 generate
Gate0Inputs(i)(iBit) <= inputs(iBit).DATA0;
Gate1Inputs(i)(iBit) <= inputs(iBit).DATA1;
end generate;
end generate;
Gate0: THmn
generic map(N => NumInputs, M => 1)
port map(inputs => Gate0Inputs(i),
output => outputs(i).DATA0);
Gate1: THmn
generic map(N => NumInputs, M => NumInputs)
port map(inputs => Gate1Inputs(i),
output => outputs(i).DATA1);
end generate;
end structural;
I tested it for 2 inputs, to make sure the generics build correctly. The outputs do not go through all combinations, since only one is allowed to be DATA1 at a time. Here’s the test script
Commit: a58ee22